Home » Link Gulf – Main Store Page » Haptic Devices » Haptic Devices Range » Force Dimension omega7 Haptic Device



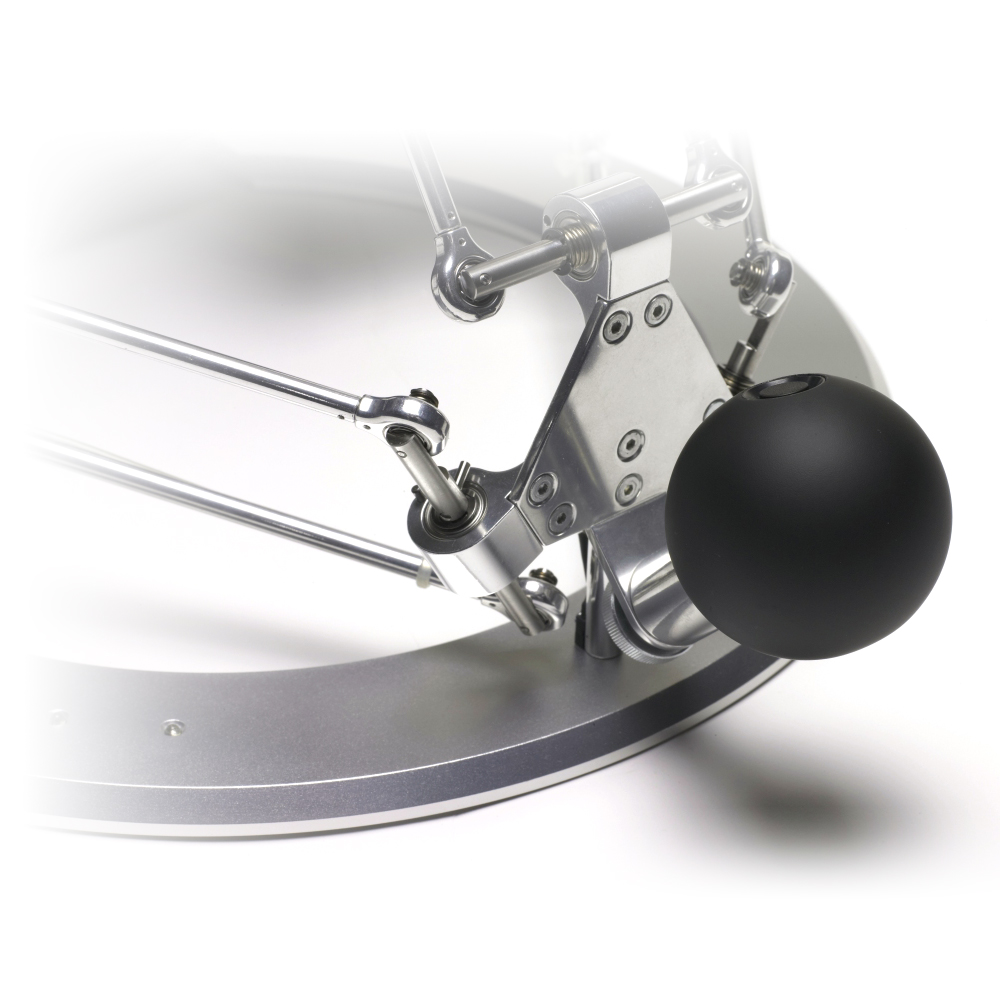


With its unique active grasping extension, the Force Dimension omega7 is the most versatile haptic device available. Its end-effector covers the natural range of motion of the human hand and is compatible with a bi-manual teleoperation console design.
The combination of full gravity compensation and driftless calibration contributes to greater user comfort and accuracy. The active gripper can generate a grasping force of up to 8 Newtons in both directions.
Request a Quote
Prices shown are for the United Arab Emirates only and exclude VAT @ 5% Local Rate (Unless Otherwise Stated).
Other countries may incur additional import duties.
Please Contact Us for further details and pricing for your country or location.
With its unique active grasping extension, the Force Dimension omega7 is the most versatile haptic device available. Its end-effector covers the natural range of motion of the human hand and is compatible with a bi-manual teleoperation console design.
The combination of full gravity compensation and driftless calibration contributes to greater user comfort and accuracy. The active gripper can generate a grasping force of up to 8 Newtons in both directions.
The omega7 comes in either left- or right-hand configuration and leverages all translational force feedback capabilities of the omega3.
The Force Dimension omega7 provides 3D active force feedback, rotation sensing and active grasping for a wide range of applications:
| workspace | translation | ∅ 160 x 110 mm |
| rotation | 240 x 140 x 320 deg | |
| gripper | 25 mm | |
| forces | translation | 12.0 N |
| rotation | not actuated | |
| gripper | 8.0 N | |
| resolution | translation | < 0.01 mm |
| rotation | 0.09 deg | |
| gripper | 0.006mm | |
| interface | standard | USB 2.0 |
| rate | up to 4 KHz | |
| power | Universal | 100V – 240V |
| platforms | Microsoft | Windows |
| Linux | all distributions | |
| Apple | macOS | |
| Blackberry | QNX | |
| WindRiver | VxWorks | |
| software | SDK Haptics | |
| SDK Robotics | ||
| CHAI3D | ||
| ergonomics | available in left- and right-hand configuration | |
| structure | delta-based parallel kinematics | |
| hand-centered rotation movements | ||
| decoupling between translation and rotation movements | ||
| active gravity compensation | ||
| calibration | automatic | |
| driftless | ||
| user input | 1 simulated button using the force gripper | |
| safety | velocity monitoring | |
| electromagnetic damping | ||



