Home » Link Gulf – Main Store Page » Haptic Devices » Haptic Devices Range » Force Dimension sigma7 Haptic Device



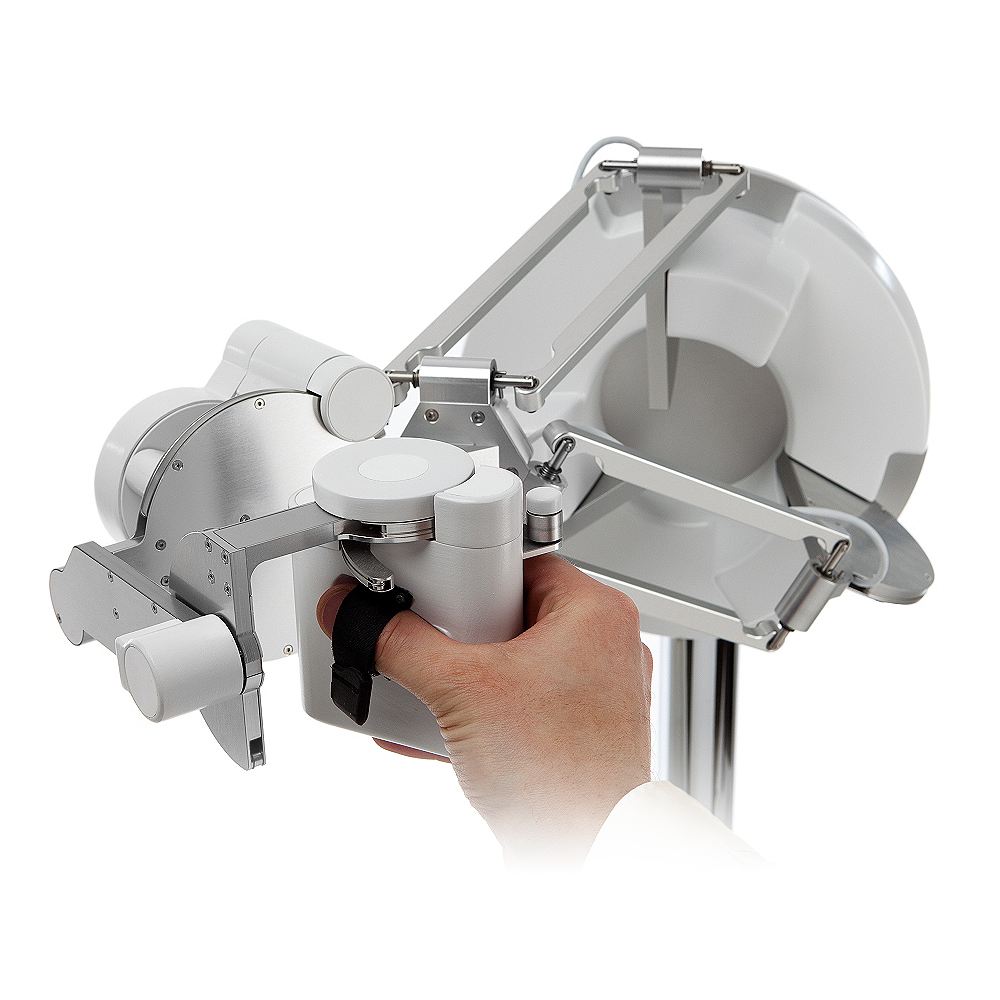

The Force Dimension Sigma7 is the most accomplished master haptic interface ever designed by Force Dimension. Introducing a redesigned delta base, this device is the first commercial haptic interface to offer seven active degrees of freedom, including high-precision force-feedback grasping capabilities.
Finely tuned to display perfect gravity compensation, the force-and-torque-feedback end-effector offers extraordinary haptic performance, enabling instinctive interaction with complex haptic applications.
Designed for advanced aerospace and medical industries to enable elaborate control of dexterous robots, its highly ergonomic and distinctive design makes the sigma7 the reference device for safety-critical applications.
Request a Quote
Prices shown are for the United Arab Emirates only and exclude VAT @ 5% Local Rate (Unless Otherwise Stated).
Other countries may incur additional import duties.
Please Contact Us for further details and pricing for your country or location.
The Force Dimension Sigma7 is the most accomplished master haptic interface ever designed by Force Dimension. Introducing a redesigned delta base, this device is the first commercial haptic interface to offer seven active degrees of freedom, including high-precision force-feedback grasping capabilities.
Finely tuned to display perfect gravity compensation, the force-and-torque-feedback end-effector offers extraordinary haptic performance, enabling instinctive interaction with complex haptic applications.
Designed for advanced aerospace and medical industries to enable elaborate control of dexterous robots, its highly ergonomic and distinctive design makes the sigma7 the reference device for safety-critical applications.
The sigma7 is also the first and only commercial 3D force-feedback interface to have ever been certified and used in space.
The device is available in left- and right-hand configurations and can be integrated into a dual workstation setup for bimanual operation.
Finely built around its unique parallel kinematics structure, the sigma7 device is designed for performance. Its superior mechanical stiffness, combined with its real-time USB 2.0 controller, enables the rendering of high contact forces at a rate attaining 4 KHz. To provide the highest degree of haptic transparency, accurate gravity compensation is maintained in translation and orientation space by perfectly coupling passive and actuated components together. Each system is individually calibrated to ensure repeatable and optimal precision and performance. Its unique kinematics design perfectly decouples translations and rotations, enabling the sigma.7 to exceed the requirements of the most demanding applications. Force Dimension also provides advanced technical support for dedicated applications that require custom end-effectors for the sigma.7.
| workspace | translation | ∅ 190 x 130 mm |
| rotation | 235 x 140 x 200 deg | |
| gripper | 25 mm | |
| forces | translation | 20.0 N |
| rotation | 400 N | |
| gripper | 8.0 N | |
| resolution | translation | < 0.0015 mm |
| rotation | 0.013 deg | |
| gripper | 0.006mm | |
| interface | standard | USB 2.0 |
| rate | up to 4 KHz | |
| power | Universal | 100V – 240V |
| platforms | Microsoft | Windows |
| Linux | all distributions | |
| Apple | macOS | |
| Blackberry | QNX | |
| WindRiver | VxWorks | |
| software | SDK Haptics | |
| SDK Robotics | ||
| CHAI3D | ||
| ergonomics | available in left- and right-hand configuration | |
| structure | delta-based parallel kinematics | |
| hand-centered rotation movements | ||
| decoupling between translation and rotation movements | ||
| active gravity compensation | ||
| calibration | automatic | |
| driftless | ||
| user input | 1 simulated button using the force gripper | |
| safety | velocity monitoring | |
| electromagnetic damping | ||



